




Variateur de vitesse à boucle fermée Fieldbus pour moteurs pas à pas ECT42/ECT60/ECT86


Présentation du produit



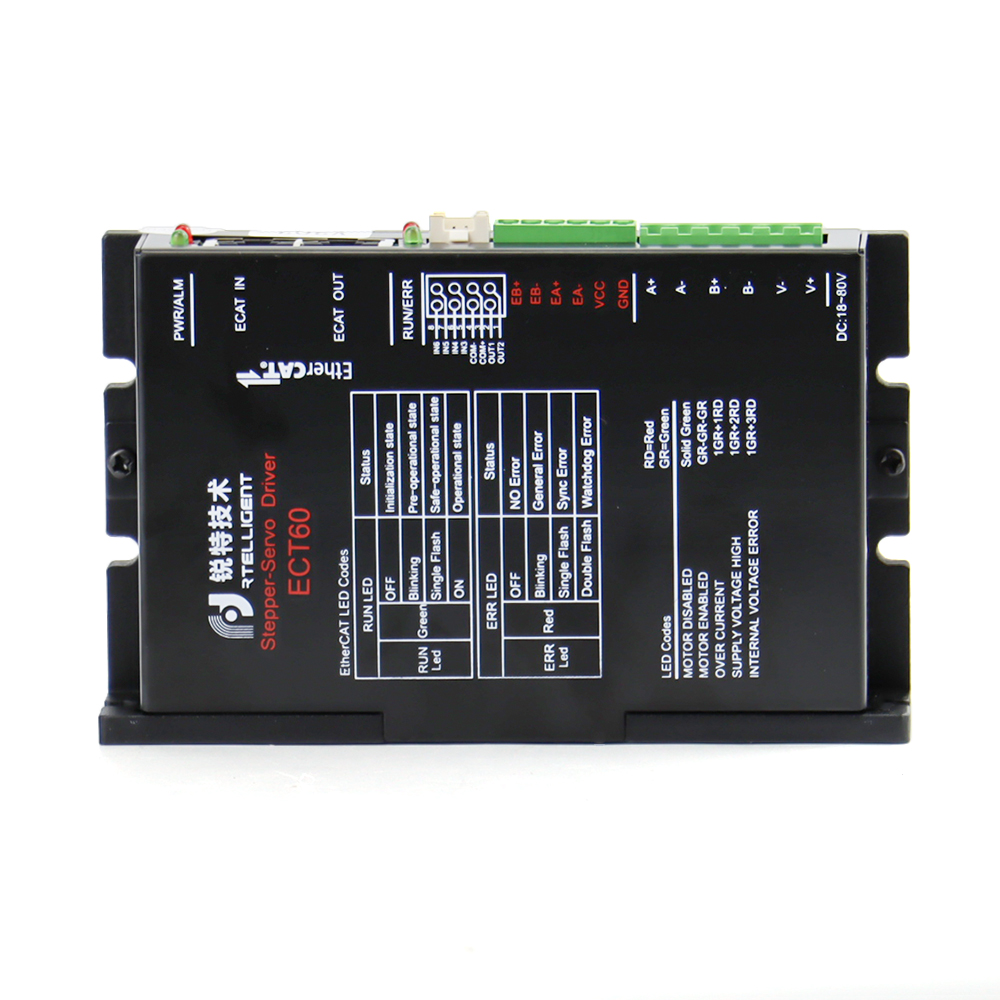
Connexion

Caractéristiques
• Prise en charge du CoE (CANopen sur EtherCAT), conforme aux normes CiA 402
• Prise en charge des modes CSP, PP, PV et de retour à l'origine
• La période de synchronisation minimale est de 500 µs.
• Connecteur RJ45 double port pour communication EtherCAT
• Méthodes de contrôle : contrôle en boucle ouverte, contrôle en boucle fermée / contrôle FOC (prise en charge de la série ECT)
• Type de moteur : biphasé, triphasé ;
• Port d'E/S numérique :
4 entrées de signaux numériques optiquement isolées : IN 1, IN 2 est une entrée d'encodeur ; IN 3~IN 6 est une entrée asymétrique 24 V, méthode de connexion à anode commune ;
2 sorties de signaux numériques optiquement isolées, tension de tolérance maximale 30 V, courant de charge ou de décharge maximal 100 mA, méthode de connexion à cathode commune.
Caractéristiques électriques
| Modèle de produit | ECT42 | ECT60 | ECT86 |
| Courant de sortie (A) | 0,1~2A | 0,5~6A | 0,5~7A |
| Courant par défaut (mA) | 450 | 3000 | 6000 |
| tension d'alimentation | 24~80 V CC | 24~80 V CC | 24~100 V CC / 24~80 V CA |
| Moteur adapté | En dessous de 42 de base | En dessous de 60 de base | En dessous de 86 de base |
| Interface de l'encodeur | Encodeur orthogonal incrémental | ||
| Résolution de l'encodeur | 1000 à 65535 impulsions/tour | ||
| Entrée d'isolation optique | 4 canaux d'entrée 24 V à anode commune | ||
| Sortie d'isolation optique | 2 canaux : alarme, frein, position et sortie générale | ||
| interface de communication | Double port RJ45, avec indicateur LED de communication | ||
-
 Manuel d'utilisation de la série Rtelligent ECT
Manuel d'utilisation de la série Rtelligent ECT



